
- 主題:Age-related compensation: Neuromusculoskeletal capacity, reserve & movement objectives
- 來源:Journal of Biomechanics
- 作者:Elinevan der KrukafAnne、Anne K.Silvermanb、Louis Koiziac、Peter Reilly、Michael Fertlemane、Anthony M.J.Bullf
- 文章類型:Open access(開放存取)
- 發表日期:2021/04/20(第 122 卷,2021/06/09)
- 翻譯編輯:夜狸
- 為了使內容易於理解,中文標點符號用容易理解的方式標註,而非中文標準語法。
- 一部分冗長的句子或單辭註解用〈〉作為 which, that 的補充說明。
- 一些多項目列舉(…, … and/or …),為了易於理解,會加上原文沒有的『』或是用列表表示。
- 個人獨力編輯難免有誤,如果有發現錯誤可以在評論區留言,我會再次比對、修正。感激不盡!
 夜黎
夜黎本文章由 Elsevier Ltd. 出版。創用 CC BY 4.0 聲明 許可下的開放獲取文章。
摘要
理想情況下,運動障礙的預防、緩解和治療需要早期診斷或識別。 由於人體運動系統具有生理的和功能的冗餘〔redundancy〕,因此在身體衰退開始時不會立即出現運動限制。
因此,運動限制的預測是複雜的:在運動限制開始之前,尚不清楚可以容忍多少衰退。 目前,術語「穩態儲備〔homeostatic reserve〕」或「生理儲備〔physiological reserve〕」被用於指出人體生物系統的冗餘,但這些術語並不描述人體肌肉結構的冗餘。 功能冗餘的結果是補償。 儘管補償是運動受限的早期預測指標,但缺乏明確的定義,並且該主題在文獻中曝光不足。
本文的目的是提供補償的定義,並且強調其重要性。 補償被定義為『運動軌蹟的改變和/或改變肌肉募集,以完成運動任務』。
對能力〔capacity〕的補償是神經肌肉骨骼儲備不足的結果,其中儲備被定義為能力(神經肌肉骨骼系統的生理能力〔physiological abilities〕)與任務需求之間的差異。對運動目標〔movement objectives〕的補償是運動目標權重變化的結果,反映了優先級的變化。 研究生物力學中的補償,需要改變實驗設置中的協議、不依賴於規定運動的肌肉骨骼模型,以及在最佳控制理論中包含替代運動目標。
關鍵詞
可動性損害〔Mobility impairments〕;神經肌肉骨骼模型〔Neuromusculoskeletal models〕;康復〔Rehabilitation〕;最佳控制理論〔Optimal control theory〕;虛弱〔Frailty〕;冗餘〔Redundancy〕
簡介
到 2050 年,除非洲以外的所有地區將有至少 25% 的人口超過 60 歲,屆時 80 歲或以上人口的比例將增加兩倍(UN 2019)。 老齡化通常伴隨著可動性的下降,這可能導致喪失獨立性、無法工作、社會排斥和生活質量下降(政府科學辦公室,2014 年)。
理想情況下,運動限制將在早期階段得到識別和預防。 因此,導致可動性障礙的機制是『在生理學、生物力學和運動控制領域中,主要研究的課題』。 雖然生物力學和運動控制領域試圖(通過了解生物系統的動力學和控制)了解與年齡相關的可動性衰退的機制,但生理學領域側重於生物過程。 結合來自這些不同領域的知識,對於了解與年齡相關的運動障礙是必要的。
日常生活活動,例如走路、從椅子上站起來或上樓梯,都是複雜的運動任務,涉及微妙的肌肉控制和軌跡規劃(Harper、Wilken 和 Neptune 2018;Caruthers 等人 2016;Winter 1995)。 因為人體有冗餘,運動限制不會在身體衰退開始時立即出現(Lipsitz 2002)。 可用於補償年齡和疾病相關變化的生物冗餘被稱為「穩態儲備〔homeostatic reserve〕」或「生理儲備〔physiological reserve〕」(Clegg et al. 2013)。這些術語也用於表示虛弱或患者是否有可能從刺激〔insult〕中恢復(Rockwood et al. 2005)。
然而,這些術語並沒有包含人體肌肉結構中的冗餘,即功能性冗餘〔functional redundancy〕。諸如「生理能力〔physiological capacity〕」(Oseid 1973)、「肌肉骨骼儲備〔musculoskeletal reserve〕」(Bull、Cleather 和 Southgate 2008)和「肌肉骨骼能力〔musculoskeletal capacity〕」(Nygard 等人 1987)等術語已經被使用,但在生物力學和運動控制領域缺乏對這些術語的一般理解和定義。
功能冗餘是『了解在運動限制開始之前,可以容忍多少衰退』的關鍵。 功能冗餘的結果就是我們所說的補償。 從身體開始衰退到出現運動障礙的那一刻,人類運動策略將包括補償。 因此,補償是身體衰退的早期指標,因此在臨床上很重要。
缺乏關於因功能冗餘而導致的補償的定義和術語,我們認為該主題在文獻中曝光不足。 因此,在這篇簡短的交流中,我們提出了補償的定義,並強調了將補償納入(與年齡相關的)生物力學研究的重要性。
補償
我們將補償〔compensation〕定義為『相對於基線(例如,先前狀態或對照組)的運動策略改變』。 運動策略中的補償源於人體肌肉結構的冗餘〔redundancy〕。 人類通過改變他們的運動軌跡〔movement trajectory〕和/或改變肌肉募集〔muscle recruitment〕來補償。
- 運動軌跡〔Movement trajectory〕
-
人們可以使用多種策略來完成任務以保持可動性〔retain mobility〕,包括上肢到下肢的代償和姿勢變化。 這種形式的補償是計劃運動軌蹟〔planned movement trajectory〕的變化,可以用運動學來描述。 例如,在爬樓梯時使用扶手、使用助行器行走、在步態中加寬支撐基底〔base of support〕、以較短的步長跑步,或是使用扶手從椅子上站起來。
- 肌肉募集〔Muscle recruitment〕
-
這種形式的補償涉及肌肉募集的改變選擇〔altered selection〕。 由於肌肉結構冗餘,在不改變軌蹟的情況下,也可以通過改變肌肉募集來進行補償。 健康老齡化過程中可能需要改變募集方式,這可能是肌肉群之間肌肉力量下降的相對差異(Gross et al. 1998; Abe et al. 2011)。 這種補償形式的一個例子是共同收縮〔co-contraction〕,共同收縮是一種策略,可以通過僅通過肌肉募集的變化〈而不是運動學的變化〉來增加穩定性(增加共同收縮)或減少肌肉活動(減少共同收縮)。
除了補償的形式,我們也建議區分補償的原因。 有兩種形式:
- 對容量的補償〔Compensation for Capacity〕
-
我們將神經肌肉骨骼 (NMSK) 容量定義為神經肌肉骨骼系統的生理能力。 根據容量的這種定義,我們不能直接解釋內分泌、免疫、心血管、呼吸、腎臟或大腦系統的變化。 NMSK 容量由於遺傳和/或環境因素而累積,直至出現與年齡相關的衰退(圖 1)(Kirkwood 2005)。 這種衰退是神經、肌肉和骨骼(包括軟組織)系統結構變化的結果(圖 2)。 較高的峰值(或高原〔plateau〕)容量減輕了〈由衰老或與年齡相關的疾病引起的〉衰退的影響,並且衰退的速度可以通過環境因素進行調整(Warburton、Nicol 和 Bredin,2006 年)。 接下來,我們將 NMSK 儲備定義為『特定任務』以及『容量和任務需求之間的差異』(圖 1)。
正儲備〔Positive reserve〕可以執行任務。 由於任務要求隨著任務的持續時間而變化,因此儲備也是如此。 因此,無法去實現的活動可能僅發生在部分任務中,但仍會導致任務失敗。 例如,站起來時,從椅子上抬起的點具有最高的任務需求,因此這部分任務的儲備是最小的。 這部分任務執行很可能首先受到損害。 我們定義『對容量的補償』為 NMSK 資源的改變招募,以響應 NMSK 容量的任何部分(神經、肌肉、骨骼)的低儲備(相對較高的任務需求),這種容量可能在任務執行期間的任何時刻發生。
- 對運動目標的補償〔Compensation for Movement Objectives〕
-
在容量和儲備的冗餘範圍內,人類有意識和無意識地決定運動策略。 為了實現運動目標,在能力範圍內有幾種可行的策略,每種策略都有自己的任務需求。 例如,某些策略可能對神經系統的要求比對肌肉系統的要求更多,而某些策略則不如其他策略穩定。
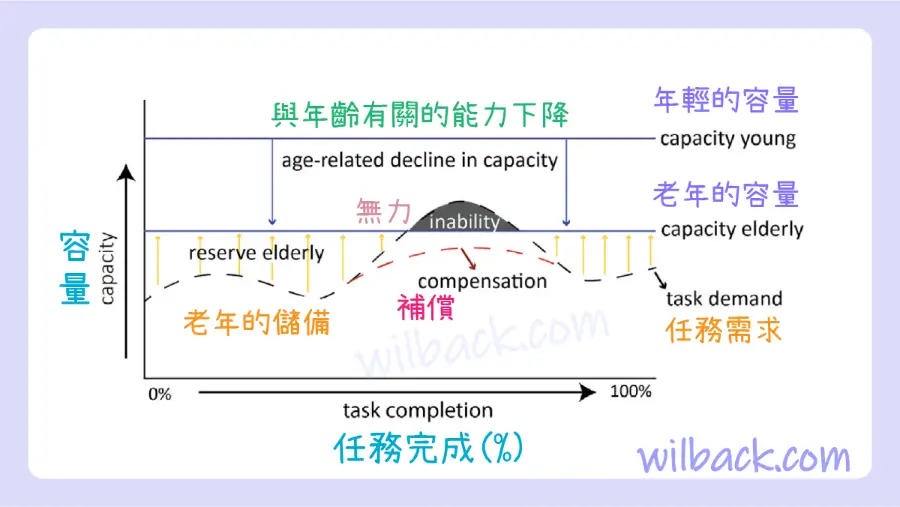
Fig. 1. 儲備是容量和任務需求之間的差異。 容量被定義為神經肌肉骨骼系統的生理能力,在這種情況下可用於這項任務。 如果儲備不能滿足任務需求,就會發生補償,這會在實現相同目標的同時改變任務需求。
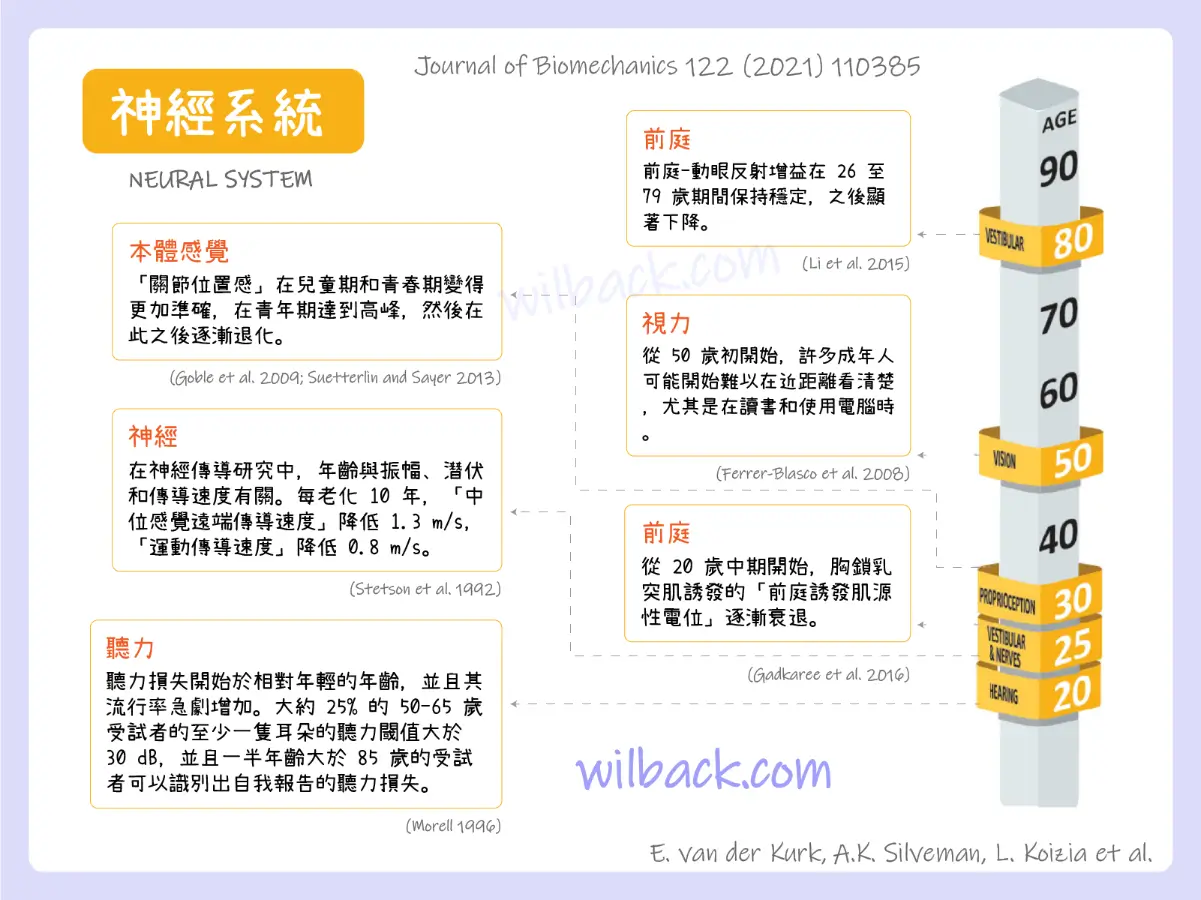
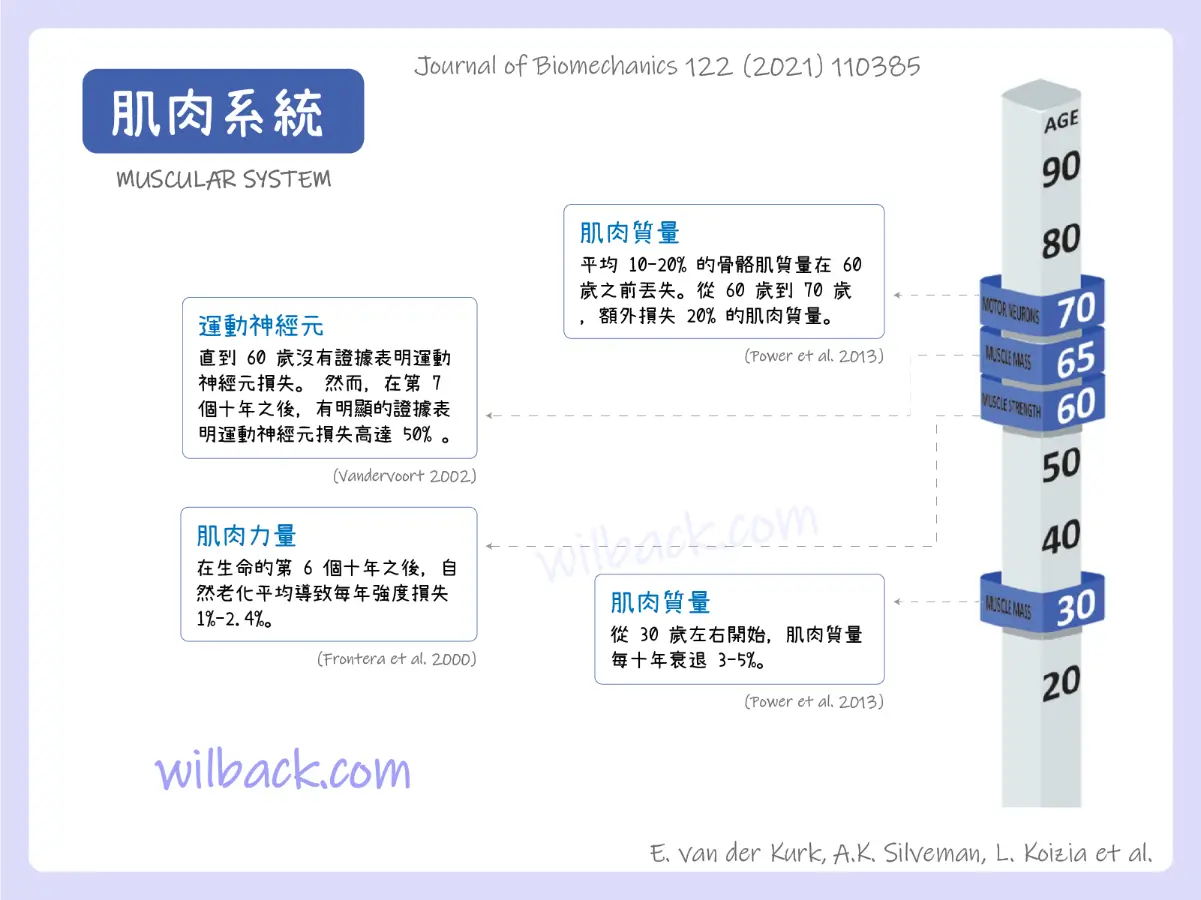
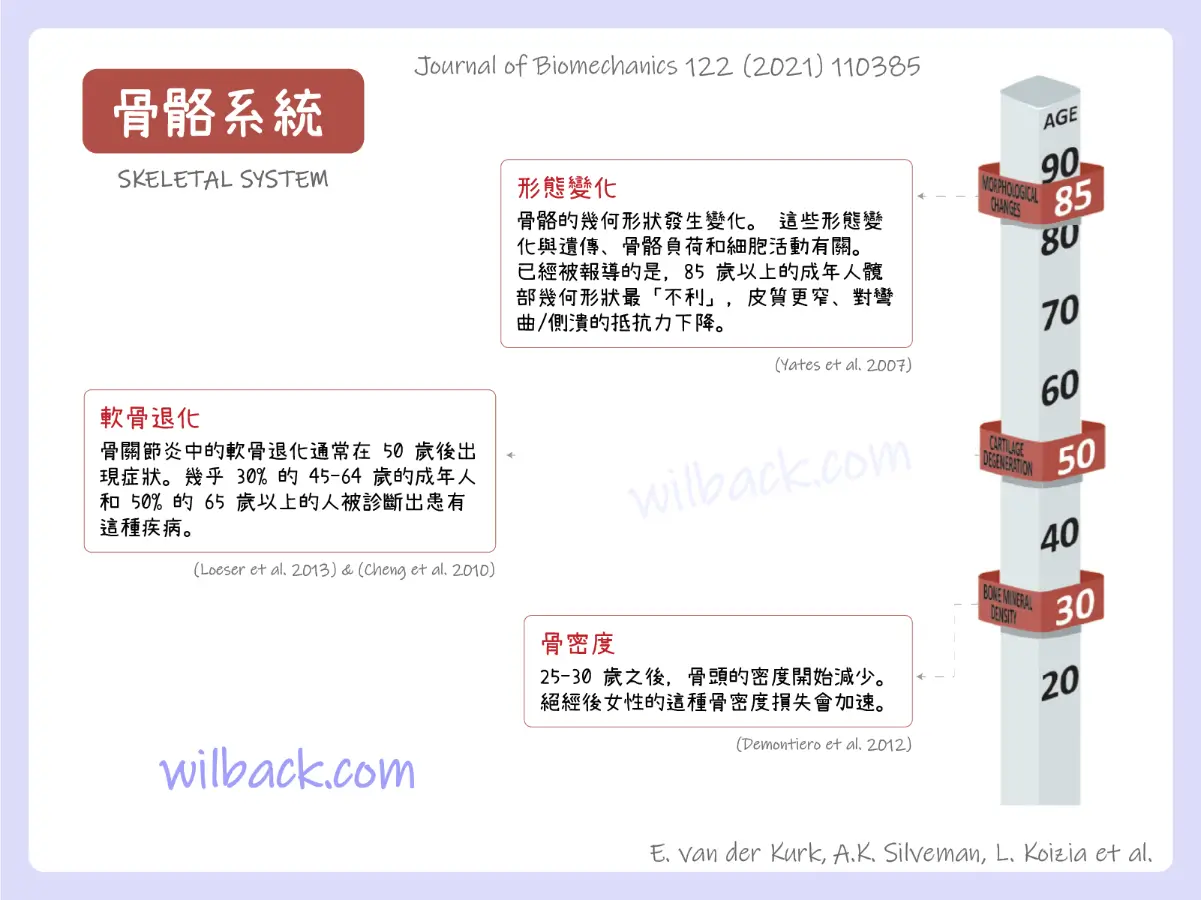
Fig. 2. 成人神經、肌肉和骨骼系統的一般衰退開始(Goble et al. 2009; Suetterlin and Sayer 2013; Gadkaree et al. 2016; Cheng et al. 2010)。
與能量相關的成本被認為是〈如標準步態等〉循環運動〔cyclic movements〕的主要驅動力(Anderson & Pandy, 2001; Cavagna & Franzetti, 1986; Hoyt & Taylor, 1981; Kuo, 2001; Minetti, Ardigo, Reinach, & Saibene, 1999 ),但還有其他驅動力 (Malatesta et al. 2003; Raynor et al. 2002)。 人類應用的運動策略可能是對代謝能量、速度、穩定性(安全性)和/或避免疼痛的考慮; 這些我們統稱為運動目標〔movement objectives〕。 尤其是在衰老和神經肌肉缺陷方面,可能會更加強調替代目標,例如穩定性以盡量減少跌倒。 因此,策略選擇在運動障礙中至關重要,儘管在日常運動中優化的具體目標尚不清楚。 由於運動目標權重的變化,對運動目標的補償表現為『運動策略的改變』。
當補償不再能夠執行手頭的任務時,就會出現無力〔inability〕和可動性限制〔mobility limitations〕(圖 1)。 容量決定了是否以及哪些補償策略可用。 因此,補償和容量是重疊和相互作用的。 容量更大的個人有更大的空間來部署有效的補償策略。但是,當補償策略導致習慣性地過度使用或使用不足的生理能力時,它們也可能是有害的〔detrimental〕。 老年人可能會進入一個負循環(衰弱循環),這會加速容量的衰退(Xue 2011)。
類似的機制在創傷事件後的年輕人中普遍存在(Schmitt、Paterno 和 Hewett 2012;Barenius 等人 2014;Cinque 等人 2018)。 在壓力源之後應用的補償,例如,步態中的不對稱去卸載受累側〔involved side〕,這可以永久改變運動策略。 這種不對稱可能導致受累側的使用不足和非受累側的過度使用,從而使神經肌肉容量長期下降。
補償策略的選擇
補償通常發生在『當生理衰退而導致缺乏儲備』之前。 換句話說,人類〈在看起來身體上有必要之前就〉改變了他們的運動學。 此外,在 NMSK 容量和儲備範圍內,有幾種可行的運動策略。
考慮到這一點,生物力學和運動控制領域主要假設『運動策略的選擇是通過成本函數的持續最佳化〔continuous optimization〕(最佳控制理論)(Todorov 和 Jordan 2002)』。 在這種情況下,運動目標及其相對權重可以被視為『導致加權平均〔weighted average〕的多目標函數〔multi-objective function〕』。 該領域的成本函數通常會最小化能源目標,同時可能存在替代方案。 多個運動目標的權重因子的變化可以解釋運動策略中與年齡相關的差異。
例如,『每單位距離的耗氧量』與『步態速度』之間的關係有一個最小值,它與成年人的首選步行速度〔preferred walking speed〕相匹配(「最佳步行速度」)(Pearce 等人 1983;di Prampero 1986)。 然而,在老年人中,首選步行速度下降,單位距離的能量消耗增加(Malatesta 等人 2003)。 這部分可以用生物變化來解釋(客觀上效率較低),但部分原因是選擇了較慢的步行速度。 選擇較低的步行速度表明運動目標的權重發生了變化,從而導致較少活力的經濟運動模式(Malatesta 等人,2003 年)。 這被假定為最小化〔minimisation〕肌肉疲勞,而不是最小化運輸的代謝成本(Song 和 Geyer 2018)。
然而,迄今為止還沒有研究探討過可能的心理原因,例如更加強調穩定性或避免疼痛。 人類可能會根據『任務目標』、『他們的能力』以及『與害怕跌倒、疼痛或未知環境相關的心理原因』對運動目標進行比較評估〔comparative assessments〕(Papa 和 Cappozzo 2000); 僅強調能源成本不足以描述運動的特徵,尤其是在人口老齡化的情況下。
生物力學研究中的補償
總而言之,NMSK 容量隨著健康老齡化而衰退。 這種衰退在神經、肌肉和骨骼系統中很明顯,每個系統都會影響複雜運動任務的執行。 對於特定的任務,人類有 NMSK 儲備,因此,如果 NMSK 容量減少,任務仍然可以完成。 人類通過改變他們的運動軌跡和/或改變肌肉募集來完成任務來補償。 補償可能是由於缺乏儲備、能力不能滿足任務要求,或者是由於運動目標的權重發生變化,反映了優先事項的變化。
實驗設計在促進或約束補償策略方面發揮著重要作用。 許多研究對協議進行了標準化,因此補償的可能性受到限制。 例如,大多數關於『從坐到站的研究』都不允許參與者使用他們的手臂進行補償,因此限制他們的轉譯去描述老年人〈在家中、社區和診所中的〉可動性(van der Kruk et al., 2021)。 因此,他們也沒有提供關於在日常生活中出現運動限制之前可以容忍多少衰退的見解,也沒有提供關於人類如何為一項任務選擇補償性運動策略的見解。
肌肉骨骼模型和模擬是用於估計人類運動變量的有用工具,這些變量難以在人類受試者中直接測量。 模型允許進行人類受試者無法進行的模擬,例如研究特定部位的肌肉無力(例如 Smith、Reilly 和 Bull 2019)。 然而,這些建模方法中的傳統方法使用規定的(測量的)運動學。 因此,這些模擬不包含補償。 如果想要對補償進行建模,運動學應該使用預測模擬從頭生成(沒有跟踪實驗數據)(Ong 等人 2017;Geijtenbeek 2019;Falisse 等人 2019)。
然而,目前的狀態預測模型〔state-of-the-state predictive models〕過於有限,無法模擬日常生活活動中的補償策略,因為它們已被分別簡化為上肢或下肢,主要是二維的(Ong 等人 2017;Falisse 等人 2019;Song 和 Geyer 2018)。 在現實中,人們經常使用平面外〔out-of-plane〕、不對稱和上下肢補償策略,例如站立或樓梯行走時的手臂支撐。 因此,在提供對人類補償策略的有效見解之前,這些模型需要進一步發展。
更新紀錄
2022/11/23 發佈本文
評論